மைக்ரோகண்ட்ரோலர் இல்லாமல் மற்றும் சிறப்பு மோட்டார் டிரைவர் சுற்றுகள் அல்லது ஐ.சி.க்களைப் பயன்படுத்தாமல் ரோபோ சர்க்யூட்டைத் தவிர்ப்பதற்கான எளிய தடையாக இந்த இடுகை விளக்குகிறது. இந்த யோசனையை திரு.பய்யாஸ் கோரினார்
வடிவமைப்பு
அடிப்படையில் இது ஒரு வடிவத்தில் உள்ளது நகரும் வாகனம் அதன் பாதையில் சாத்தியமான தடைகளை கண்டறிந்து தவிர்க்கவும், அதன் திசையை சரியான முறையில் மாற்றவும் முடியும், இதனால் அதன் இயக்கம் தடையின்றி, எளிமையாக இருக்கும்!
எந்தவொரு கையேடு அல்லது மனித தலையீடு இல்லாமல் இந்த செயல்பாடு தானாகவே இருக்கும்.
மைக்ரோகண்ட்ரோலர் இல்லாமல் ரோபோவைத் தவிர்ப்பதற்கான தடையாக வழங்கப்பட்ட யோசனை ஒரு மைக்ரோகண்ட்ரோலரைப் பயன்படுத்தாது, எனவே எந்தவொரு புதிய பொழுதுபோக்கிற்கும் இது மிகவும் எளிமையானது மற்றும் பொருத்தமானது.
சுற்றுவட்டத்தை வடிவமைக்கும்போது, கொள்கையை செயல்படுத்த குறைந்தபட்சம் இரண்டு தடைகள் சென்சார் தொகுதிகள் தேவைப்படும் என்பதை நான் உணர்ந்தேன், ஏனென்றால் ஒரு தொகுதியைப் பயன்படுத்துவது மோட்டரின் ஒழுங்கற்ற இயக்கத்தை ஏற்படுத்தக்கூடும், மேலும் சுமூகமாக திசை திருப்பவோ அல்லது வாகனத்தை நோக்கி திரும்பவோ உதவாது. ஒரு இலவச பாதை.
அமைக்கப்பட்ட வாகன மோட்டார் மிகவும் ஒத்திருக்கிறது ரிமோட் கண்ட்ரோல் பொம்மை கார் முந்தைய இடுகைகளில் ஒன்றில் நான் விவாதித்தேன்.
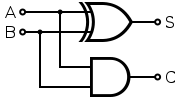
பின்வரும் வரைபடம் அமைப்பின் தொகுதிகளில் ஒன்றைக் குறிக்கிறது, எனவே வாகனத்தின் வலது மற்றும் இடது பக்கங்களில் இரண்டு அல்லது ஒரு ஜோடி அத்தகைய தொகுதிகள் தேவைப்படும்.
யோசனை எளிமையானது மற்றும் மைக்ரோகண்ட்ரோலர் இல்லாமல் மற்றும் சிறப்பு மோட்டார் டிரைவர் ஐ.சி.க்கள் இல்லாமல் செயல்படுகிறது. அதாவது நீங்கள் எந்த வகையான குறியீட்டு முறையுமின்றி மற்றும் எந்தவிதமான சிக்கலான மோட்டார் இயக்கி ஐ.சி யையும் பயன்படுத்தாமல் செய்ய முடியும் ..... மேலும் எந்தவொரு டி.சி மோட்டாரையும் அதன் சக்தியைப் பொருட்படுத்தாமல் பயன்படுத்த சுற்று அனுமதிக்கிறது, எனவே வாகனங்களைத் தவிர்ப்பதற்கான உயர் சக்தி தடையாக கூட இருக்கலாம் இந்த சுற்று பயன்படுத்தி பொதுவாக மால்கள் மற்றும் ஒத்த சில்லறை விற்பனை நிலையங்களில் பயன்படுத்தப்படுகிறது.
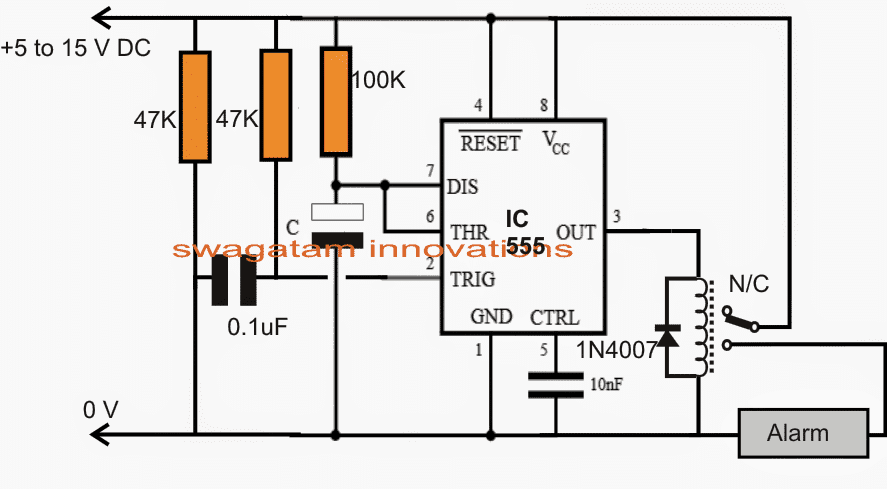
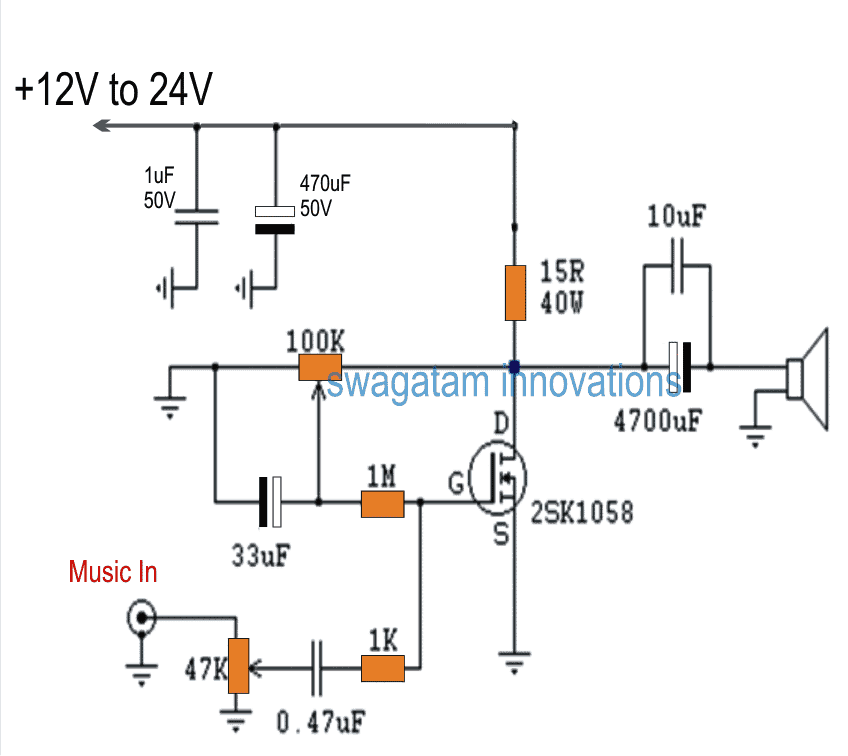
சுற்று வரைபடம்

இப்போது பின்வரும் விளக்கத்தின் உதவியுடன் மேலே உள்ள சுற்றுகளைப் புரிந்து கொள்ள முயற்சிப்போம்:
எப்படி இது செயல்படுகிறது
ஐசி 555 ஐஆர் டிரான்ஸ்மிட்டராக கட்டமைக்கப்பட்டுள்ளது மற்றும் நிலையான 38 கிஹெர்ட்ஸ் அதிர்வெண்ணை உருவாக்க அமைக்கப்பட்டுள்ளது, அதே சமயம் அருகிலுள்ள டிரான்சிஸ்டோரைஸ் செய்யப்பட்ட சுற்று ரிசீவர் நிலை அல்லது ஐஆர் சென்சார் கட்டமாக கட்டமைக்கப்படுகிறது.
இது வலது பக்க தொகுதி என்று வைத்துக் கொள்வோம், மேலும் இந்த தொகுதி பாதையில் ஒரு தடையை கண்டறிந்த முதல் நபராக இருக்கும் என்று வைத்துக்கொள்வோம்.
எனவே ஒரு தடையாக கண்டறியப்பட்டவுடன், 555 ஐசியால் உருவாக்கப்படும் 38 கிஹெர்ட்ஸ் அதிர்வெண் அருகிலுள்ள ரிசீவர் சுற்றுகளின் சென்சார் நோக்கி பிரதிபலிக்கிறது.
ரிசீவர் உடனடியாக தொடர்புடைய டிரான்சிஸ்டர்களை செயல்படுத்துகிறது, அதாவது இறுதி இயக்கி டிரான்சிஸ்டர் நடத்துவதைத் தடுக்கிறது.
இப்போது இந்த டிரான்சிஸ்டரால் கட்டுப்படுத்தப்படும் மோட்டார் வாகனத்தின் இடது பக்கத்தில் அமைந்திருக்க வேண்டும், அது இந்த தொகுதிக்கு எதிர் பக்கத்தில் உள்ளது ... இதேபோல் வலது பக்கத்தில் அமைந்துள்ள மோட்டார் உண்மையில் இடது பக்க தொகுதி மூலம் கட்டுப்படுத்தப்படுகிறது .
இதன் விளைவாக, மேலே கூறப்பட்ட வலது கை தடையாக கண்டறிதல் தொகுதி செயல்படும் போது, அது இடது கை மோட்டாரை நிறுத்துகிறது, அதே நேரத்தில் வலது பக்க மோட்டார் சாதாரணமாக செல்ல அனுமதிக்கப்படுகிறது.
இந்த நிலைமை வாகனம் இடது பக்க திசைதிருப்பலுக்கு கட்டாயப்படுத்தப்படுகிறது ... இதன் பொருள் இப்போது கருதப்படும் இடது தொகுதி இன்னும் வலுவான தடையாக சமிக்ஞைகளைப் பெறத் தொடங்குகிறது மற்றும் தடையை முற்றிலுமாகத் தவிர்க்கும் வரை வாகனம் தொடர்ந்து திசைதிருப்பப்படுவதைக் கடுமையாகத் தொடர வைக்கிறது. . தொகுதி இப்போது தடையாக சமிக்ஞைகளைப் பெறுவதை நிறுத்துகிறது மற்றும் வாகனம் அதன் புதிய பாதையில் சாதாரணமாக முன்னேறத் தொடங்குகிறது.
மேற்கூறிய திசைதிருப்பல் மேற்கொள்ளப்படும்போது, இடது பக்க தொகுதி மேலும் மேலும் தனிமைப்படுத்தப்பட்டு, தடையிலிருந்து விலகிச் செல்ல நிர்பந்திக்கப்படுகிறது, இதனால் நடைமுறையில் தலையிட ஒரு வாய்ப்பு கிடைக்காது, மேலும் வாகனத்தின் சுத்தமான மற்றும் மென்மையான திசைதிருப்பலை அனுமதிக்கிறது.
வலது பக்க தொகுதிக்கு முன்னால் உள்ள தடையை இடது பக்க தொகுதி உணர்ந்தால், அதே நடைமுறைகள் செயல்படுத்தப்படுகின்றன, இதில் வாகனம் வலது பக்கமாக கடினமாகவும் கடினமாகவும் செல்ல நிர்பந்திக்கப்படுகிறது.
இடது மற்றும் வலது பக்க தொகுதிகள் முழுவதும் ஒன்றோடொன்று இணைக்கப்பட்டுள்ள தொகுதியில் ஒரு 'முடக்கு' சுற்று கட்டத்தையும் நாம் காணலாம். இரண்டு தொகுதிகளும் ஒருபோதும் ஒன்றாக செயல்படுத்தப்படுவதில்லை என்பதை உறுதிப்படுத்த இந்த நிலை வேண்டுமென்றே அறிமுகப்படுத்தப்பட்டுள்ளது.
ஆகையால், இடது பக்க தொகுதி முதலில் ஒரு தடையை கண்டறிந்தால், அது உடனடியாக வலது பக்க தொகுதியை முடக்குகிறது மற்றும் வலதுபுறத்தில் வாகனத்தின் திசைதிருப்பலைத் தொடங்குகிறது.
சென்சார் ஐசி ஒரு இருக்க முடியும் நிலையான TSOP17XX தொடர்
மேலே உள்ள சென்சார் ஐசி தொடர்பான கூடுதல் தகவலுக்கு நீங்கள் கற்றுக்கொள்ளலாம் TSOP1738 IC ஐ எவ்வாறு இணைப்பது
மேலும் மோட்டார் கியர் பெட்டிகளுடன் பொருத்தப்பட வேண்டும், இதனால் இயக்கம் முதலில் கட்டுப்படுத்தப்பட்ட மட்டத்தில் பராமரிக்கப்படுகிறது.
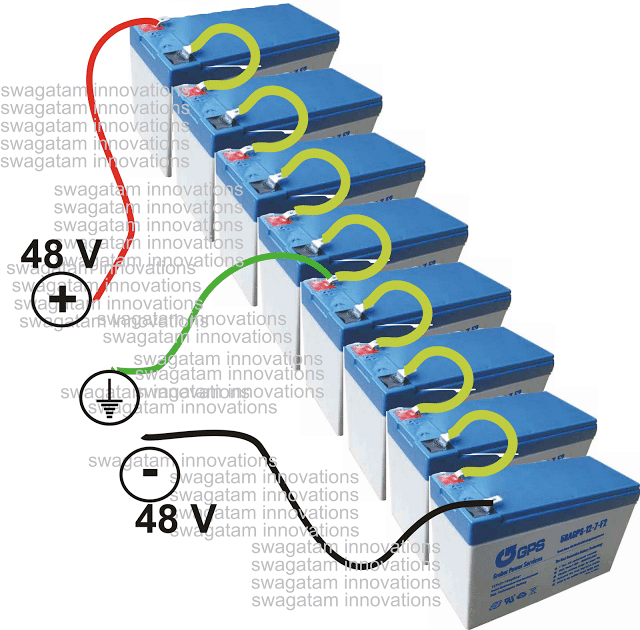
சக்கரம் அமைக்கவும்
இடது மற்றும் வலது தொகுதிகளின் முழுமையான அமைவு மற்றும் அதனுடன் தொடர்புடைய மின் இணைப்புகள் கீழே உள்ள படத்தில் காணப்படுகின்றன:

புதுப்பிப்பு
ரோபோ சர்க்யூட்டைத் தவிர்ப்பதற்கு மேலே உள்ள எளிய தடையாக இருவருக்கும் பதிலாக ஒரு தொகுதியைப் பயன்படுத்துவதன் மூலமும் செயல்படுத்த முடியும் என்று ஒரு சிறிய சிந்தனை நமக்குக் கூறுகிறது.
எவ்வாறாயினும், ஒரு தொகுதி ஒரு தடையை கண்டறியும் ஒவ்வொரு முறையும் வாகனம் ஒரு பக்க திசைதிருப்பலை மேற்கொள்ள அனுமதிக்கும், எனவே செயல்களுக்கு எந்த மோட்டார் சுற்றுடன் இணைக்கப்பட்டுள்ளது என்பதைப் பொறுத்து கடிகார திசை திருப்புதல் அல்லது எதிரெதிர் திசையில் திசை திருப்புதல் ஆகியவற்றை கணினி கட்டமைக்க முடியும்.
அமைக்கப்பட்ட உதாரணத்தை பின்வரும் படத்தில் காட்சிப்படுத்தலாம்:

இருப்பினும், மேலே உள்ள ஒற்றை மோட்டார் அமைப்பதில் ஒரு சிக்கல் இருப்பதாகத் தெரிகிறது. வாகனம் இடது பக்கத்தில் ஒரு வலது கோண மூலையை எதிர்கொள்கிறது என்று வைத்துக்கொள்வோம். இது யு-டர்ன் எடுக்கும் வரை வாகனத்தை எதிரெதிர் திசையில் நகர்த்தும்படி கட்டாயப்படுத்தும், மேலும் அது தொடங்கிய இடத்திலிருந்து அதே திசையை நோக்கி நகரத் தொடங்குகிறது. இது பயனர் பாராட்ட வேண்டிய ஒன்றல்ல.
முந்தைய: SMD மின்தடையங்கள் - அறிமுகம் மற்றும் வேலை அடுத்து: ஒரு முடுக்கமானி எவ்வாறு இயங்குகிறது