இந்த இடுகையில், ஆர்டுயினோவைப் பயன்படுத்தி ஒரு வரி பின்தொடர்பவர் ரோபோ சர்க்யூட்டை எவ்வாறு உருவாக்குவது என்பதைக் கற்றுக்கொள்கிறோம், இது குறிப்பாக வரையப்பட்ட வரி அமைப்பைக் கொண்டு இயங்கும், மேலும் அது கிடைக்கக்கூடிய மற்றும் அதன் சென்சார்கள் மூலம் கண்டுபிடிக்கக்கூடிய வரை அதை உண்மையாகப் பின்பற்றும்.
எழுதியவர் நவ்னீத் சஜ்வான்
ஒரு வரி பின்தொடர்பவர் ரோபோ என்றால் என்ன
ஒரு தன்னாட்சி ரோபோ என்பது நிகழ்நேரத்தில் ஒரு மனிதனால் கைமுறையாகக் கட்டுப்படுத்தப்படாமல், புரோகிராமரின் அறிவுறுத்தலின் படி தொடர்ச்சியான நடவடிக்கைகளை எடுக்கக்கூடிய ஒரு இயந்திரமாகும்.
வரி பின்தொடர்பவர்கள் (எல்.எஃப்.ஆர்) ஒன்று அல்லது அதற்கு மேற்பட்ட சென்சார்கள் மற்றும் கருப்பு அல்லது வெள்ளை வரி பாதையால் வழிநடத்தப்படும் தன்னாட்சி ரோபோ கார்கள். அவை நவீன சுய-ஓட்டுநர் கார்களின் அடிப்படையாக அமைகின்றன.
ஒவ்வொரு தன்னாட்சி ரோபோவைப் போலவே, வரி பின்தொடர்பவர்களுக்கும் சமிக்ஞை செயலாக்கம் மற்றும் முடிவெடுக்கும் அலகு, சென்சார்கள் மற்றும் ஆக்சுவேட்டர்கள் உள்ளன. நீங்கள் ரோபாட்டிக்ஸில் ஒரு தொடக்க வீரராக இருந்தால், அதை தீவிரமாக எடுத்துக் கொள்ள விரும்பினால், நீங்கள் தொடங்க வேண்டியது இதுதான். இதை உருவாக்க ஆரம்பிக்கலாம்.
இந்த திட்டத்தை உருவாக்க நான் இரண்டு அகச்சிவப்பு சென்சார்கள் மற்றும் மூன்று சக்கர டிரைவைப் பயன்படுத்தினேன். பயன்படுத்தக்கூடிய குறைந்தபட்ச எண்ணிக்கையிலான சென்சார்கள் ஒன்று மற்றும் பிஐடி அடிப்படையிலான வரிக்கு அதிகபட்சம் எட்டு போதுமானது.
தேவையான கூறுகள்:
Arduino uno
சேஸ்பீடம்
இரண்டு பேட்டரி இயக்கப்படும் (b.o.) மோட்டார்கள் மற்றும் இணக்கமான டயர்கள்
ஆமணக்கு பந்து
இரண்டு அகச்சிவப்பு சென்சார்கள்
மோட்டார் இயக்கி தொகுதி
மின்சாரம்
Arduino IDE மென்பொருள்
இப்போது, எங்கள் கூறுகளைப் பார்ப்போம்:
ARDUINO ONE : இதை எங்கள் ரோபோவின் கட்டுப்பாட்டு அறையாக கற்பனை செய்து பாருங்கள் .இப்போது, இந்த திட்டத்திற்காக கருதப்பட்ட பல மேம்பாட்டு வாரியங்கள் உள்ளன, ஆனால் Arduino UNO வெறுமனே மற்றவர்களுடன் பொருந்தவில்லை. எங்கள் கதாநாயகன் அதன் பல பரிமாண அம்சங்களின் அடிப்படையில் உயர்ந்தவர் அல்ல.
அப்படியானால், ராஸ்பெர்ரி பை மற்றும் இன்டெல் எடிசன் அதை கண்களுக்கு இடையில் நொறுக்கியிருப்பார்கள். Arduino UNO ஐத் தேர்ந்தெடுப்பதற்கு வழிவகுத்த மிகவும் கட்டாய வாதங்கள் திட்டத்திற்கான அம்சங்கள், விலை, அளவு மற்றும் தேவை ஆகியவற்றின் கலவையால் உருவாக்கப்பட்டன.
சில பொருத்தமான காரணங்கள்:
அளவு : Atmega16 அல்லது Atmega8 அடிப்படையிலான மேம்பாட்டு வாரியங்களுடன் ஒப்பிடும்போது இது மிகவும் சிறியது, சேஸில் சிறிது இடத்தைப் பயன்படுத்துகிறது, எனவே நீங்கள் ஒரு சிறிய மற்றும் எளிமையான போட் பெறுவீர்கள்.
ரோபோடிக்ஸ் போட்டிகளில் இது மிகவும் முக்கியமானது. அந்த பெரிய அசிங்கமான போட், நாள் முழுவதும் இடங்களை மாற்றுவதன் மூலம் நீங்கள் சுற்றித் திரிவதை வெறுப்பீர்கள் என்று என்னை நம்புங்கள்.
சிறிய அளவு, வேகமான ரோபோ மற்றும் திறமையான திருப்பங்கள்.
சிறந்த பாதுகாப்பு வாரியம் : சந்தேகத்திற்கு இடமின்றி, Arduino UNO இன் சிறந்த அம்சங்களைக் கொண்டுள்ளது முன்மாதிரி . உங்கள் சுற்றுகள் அமைந்ததும், உங்கள் திட்டம் சரியாகச் செயல்பட்டதும், அதை ஆர்டுயினோ நானோ மற்றும் அட்டினி 85 ஐசி போன்ற சிறிய மற்றும் மலிவான ஒன்றை மாற்றலாம்.
அவர்களைப் பொறுத்தவரை, கல்லூரித் திட்டங்களுக்கு வரி பின்தொடர்பவர்களை உருவாக்குவது, இறுதியில் UNO ஐ நானோவுடன் மாற்ற பரிந்துரைக்கிறேன்.
சேஸ்பீடம் : இது அனைத்து கூறுகளையும் நிலையில் வைத்திருக்கும் சட்டமாகும். புதிய சேஸை வாங்கும் போது சில விஷயங்களை கவனத்தில் கொள்ள வேண்டும்,
இது இலகுரக மற்றும் வலுவாக இருக்க வேண்டும்.
திட்டங்களுக்கு, நீங்கள் சந்தையில் இருந்து ஒன்றை வாங்கினால் நல்லது. ஆனால் நீங்கள் போட்டிக்குத் தயாராகி வருகிறீர்கள் என்றால், போட்டியின் பரிமாணங்கள் மற்றும் தேவைகளை மனதில் வைத்து உங்கள் சொந்தத்தைத் தனிப்பயனாக்குமாறு நான் கடுமையாக பரிந்துரைக்கிறேன்.
ஒரு பிளாஸ்டிக் அல்லது மர சேஸ் தேர்வு. உலோக பிரேம்கள் அர்டுயினோவுடன் தொடர்பு கொள்ளும்போது, பல ஊசிகளும் குறைக்கப்படுகின்றன. சேஸைத் தேடும்போது கவனம் செலுத்த இது ஒரு பெரிய காரணியாகும்.
உங்கள் சேஸை முடிந்தவரை குறைவாக வைத்திருங்கள் - இது போட்டிற்கு ஸ்திரத்தன்மையை அளிக்கிறது.
மோட்டார்ஸ் : குறைந்த எடை கொண்ட பேட்டரி இயக்கப்படும் (B.O.) d.c. மோட்டார்கள்.

காஸ்டர் பால் : இயல்பான சக்கரங்கள் ஒற்றை அச்சில் மொழிபெயர்ப்பு இயக்கத்தை வழங்குகின்றன, ஆனால் ஒரு ஆமணக்கு பந்து மேற்பரப்பில் எந்த திசையிலும் செல்ல வடிவமைக்கப்பட்டுள்ளது. இது எங்களுக்கு மூன்று சக்கர டிரைவ் தருகிறது.
4 சக்கரங்களுக்கு மேல் மூன்று சக்கர டிரைவை விரும்புவதற்கான காரணம், அதன் ஒப்பீட்டளவில் வேகமாக திரும்பும் செயல். ஊர்வன போன்ற போக்குவரத்து வழியாக சுழற்சி ரிக்ஷாக்கள் துளைப்பதை நீங்கள் கவனித்திருக்கலாம். எங்கள் ரோபோவின் விஷயமும் அப்படித்தான்.

சென்சார்கள் : இது நமது சூழலின் எந்தவொரு உடல் அளவுருவையும் கண்டறிந்து அளவிடும் மற்றும் அதை மின்சார சமிக்ஞைகளாக மாற்றும் சாதனம். இந்த வழக்கில் கண்டறியப்பட்ட அளவுரு அகச்சிவப்பு கதிர்கள்.
எந்த ரோபோவிற்கும் சென்சார்கள் மிகவும் அடிப்படை. அர்டுயினோ எங்கள் போட்ஸின் மூளையாக இருந்தால், சென்சார்கள் கண்களின் பாத்திரத்தையும் வகிக்கக்கூடும். சென்சார்கள் பற்றிய சில விஷயங்கள் இங்கே:
சென்சார்கள் தரையை எதிர்கொள்ளும் வகையில் வழிநடத்தப்பட வேண்டும்.
உங்கள் போட்டின் முன் முனையில் வைக்கப்பட வேண்டும்.
அவற்றுக்கிடையேயான குறைந்தபட்ச இடைவெளி கருப்பு கோட்டின் அகலத்தை விட அதிகமாக இருக்க வேண்டும்.
மோட்டார் டிரைவர் போர்டு : மோட்டார்-டிரைவர்கள் அதிக மின்னழுத்தம் தேவைப்படும் மோட்டார்களை இயக்குவதற்கு குறைந்த மின்னழுத்த சமிக்ஞைகளை எடுக்கும் இடையக சுற்றுகள் ஆகும்.
எங்கள் விஷயத்தில், ஆர்டுயினோ மோட்டார்கள் இயக்க போதுமான மின்னழுத்தத்தை வழங்க முடியும், ஆனால் அது போதுமான மின்னோட்டத்தை வழங்க முடியாது. Arduino UNO இன் 5v மற்றும் GND ஊசிகளின் தற்போதைய மதிப்பீடு 200mA ஆகவும், எந்த GPIO முள் 40 mA மதிப்பீட்டைக் கொண்டுள்ளது. இது நமக்குத் தேவையான தொடக்க மற்றும் ஸ்டால் நீரோட்ட மோட்டார்கள் விட குறைவாக உள்ளது.
இந்த திட்டத்திற்கு நான் விரும்பும் இரண்டு மோட்டார் இயக்கிகள் உள்ளன: L298N மற்றும் L293D. இந்த திட்டத்தை உருவாக்க இவை இரண்டும் சமமாக பொருத்தமானவை.
என்றாலும், எல் 293 டி ஒப்பீட்டளவில் மலிவானது ஆனால் குறைந்த தற்போதைய மதிப்பீட்டைக் கொண்டுள்ளது. அவற்றின் இணைப்புகள் கிட்டத்தட்ட ஒரே மாதிரியானவை. இருவருக்கான இணைப்புகளை நான் கொடுத்துள்ளதால், உங்கள் போட்டை எவ்வாறு உருவாக்குகிறீர்கள் என்பது முற்றிலும் உங்களுடையது.


சக்தி வழங்கல் :
12 v அடாப்டர் அல்லது பேட்டரியைப் பயன்படுத்தவும் (12 வோல்ட்டுகளுக்கு மிகாமல்).
கூறுகளின் வேலைவாய்ப்பு (முன் முதல் பின் முனை வரை):
உங்கள் போட்டின் தலைப்பகுதியில் சென்சார்கள்.
நடுவில் ஆமணக்கு சக்கரம்.
பின்புறத்தில் ஒரு வரியில் மோட்டார்கள் மற்றும் டயர்கள்.
இணைப்புகள்:
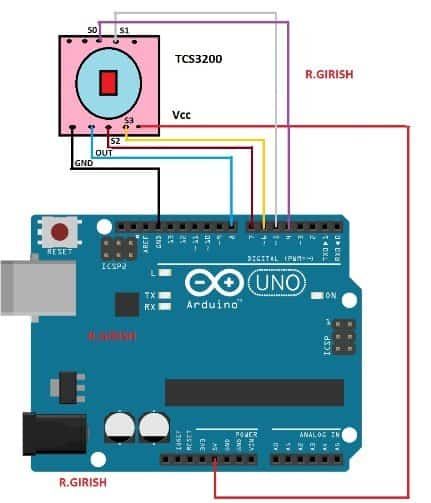
ARDUINO க்கு சென்சார்கள் :
காட்டப்பட்டுள்ளபடி சென்சார் முள் அர்டுயினோ முள் உடன் இணைக்கவும்,


| சென்சார் முள் | அர்டுயினோ முள் |
| வி.சி.சி (5 வி) | 5 வி |
| GND (G) | ஜி.என்.டி. |
| இடது சென்சார் அவுட் (DO) | முள் 6 |
| சரியான சென்சார் அவுட் (செய்யுங்கள்) | முள் 7 |
குறிப்பு: உங்கள் சென்சார்கள் இயக்கப்பட்டிருக்கிறதா என்று சோதிக்க, உங்கள் செல்போன் கேமராவை ஐஆர் டிரான்ஸ்மிட்டரில் வழிநடத்துங்கள். எங்கள் நிர்வாண கண்களால் பார்க்க முடியாத திரையில் ஒளி வீசுவதை நீங்கள் காண்பீர்கள். சில நவீன செல்போன் கேமராக்களில் இன்ஃப்ரா சிவப்பு வடிகட்டி உள்ளது. எனவே, தயவுசெய்து அதை கணக்கில் எடுத்துக் கொள்ளுங்கள்.
மோட்டார் டு மோட்டர் டிரைவர்:
ஒவ்வொரு மோட்டருக்கும் இரண்டு டெர்மினல்கள் உள்ளன, அவை மோட்டார் டிரைவருடன் இணைக்கப்பட வேண்டும். அவற்றை நேரடியாக arduino உடன் இணைக்க முயற்சிக்க வேண்டாம். உங்கள் போட்டின் பின்புறத்திலிருந்து பார்க்கும்போது, உங்களுக்கு அருகிலுள்ள மோட்டார்கள் மற்றும் சென்சார்கள் தொலைவில் உள்ளன, அவற்றை பின்வருமாறு இணைக்கவும்:


| பொறி | எல் 298 என் | எல் 293 டி |
| இடது மோட்டார் | பின் 1 மற்றும் 2 | பின் 7 மற்றும் 8 |
| வலது மோட்டார் | பின் 13 மற்றும் 14 | பின் 9 மற்றும் 10 |
ARDUINO UNO க்கு மோட்டார் டிரைவர்:

| மோட்டார் டிரைவர் (எல் 298 என்) | ARDUINO ONE |
| பின் 4 | WINE |
| பின் 5 | ஜி.என்.டி. |
| பின் 6 | 5 வி |
| பின் 8 & பின் 9 | பின் 3 & பின் 9 |
| பின் 10 & பின் 11 | பின் 5 & பின் 10 |
| பின் 7 & பின் 12 | 5 வி |
| மோட்டார் டிரைவர் (எல் 293 டி) | ARDUINO ONE |
| பின் 3 | WINE |
| பின் 2 | ஜி.என்.டி. |
| பின் 1 | 5 வி |
| பின் 5 மற்றும் பின் 6 | பின் 3 & பின் 9 |
| பின் 11 மற்றும் பின் 12 | பின் 5 & பின் 10 |
| பின் 4 மற்றும் பின் 5 | 5 வி |
குறிப்பு: 1 மற்றும் 2 உடன் இணைக்கப்பட்ட மோட்டாரைக் கட்டுப்படுத்த l298n இன் பின்ஸ் 8 மற்றும் 9 பயன்படுத்தப்படுகின்றன. மேலும், 13 மற்றும் 14 உடன் இணைக்கப்பட்ட 10 மற்றும் 11 கட்டுப்பாட்டு மோட்டார். அதேபோல், இணைக்கப்பட்ட மோட்டாரைக் கட்டுப்படுத்த l293d இன் 5 மற்றும் 6 ஊசிகளும் பயன்படுத்தப்படுகின்றன. 7 மற்றும் 8.மற்றும், 12 மற்றும் 11 கட்டுப்பாட்டு மோட்டார் பின்ஸ் 9 மற்றும் 10 உடன் இணைக்கப்பட்டுள்ளது.
இங்கே நாம் தோழர்களே, வடிவமைப்பு பகுதியின் இறுதி வரை. எங்களிடம் இன்னும் குறியீட்டு முறை உள்ளது, ஆனால் அதற்கு முன் வரி-பின்தொடர்வை அனுமதிக்கும் கொள்கைகளை நாங்கள் பார்ப்போம்.
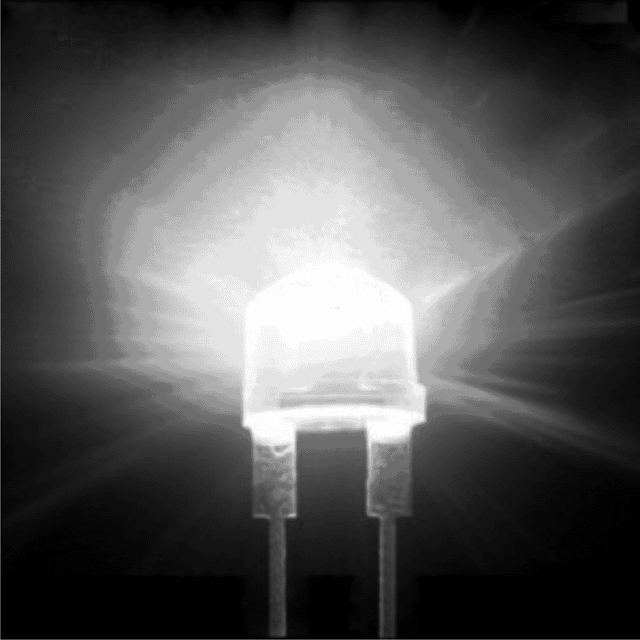
அகச்சிவப்பு சென்சார் எவ்வாறு செயல்படுகிறது:
இன்ஃப்ரா ரெட் சென்சார்கள் (ஐஆர் சென்சார்கள்) வண்ணங்களில் உள்ள மாறுபாட்டையும், பொருள்களின் அருகாமையையும் உணர பயன்படுத்தலாம். ஐஆர் சென்சார் வேலை செய்வதற்குப் பின்னால் இருக்கும் கொள்கை மிகவும் அடிப்படை.
நாம் பார்க்க முடியும் என, இது இரண்டு லெட்களைக் கொண்டுள்ளது - ஐஆர் உமிழும் லெட் மற்றும் ஒரு ஃபோட்டோடியோட். அவை டிரான்ஸ்மிட்டர்-ரிசீவர் ஜோடியாக செயல்படுகின்றன. உமிழ்ப்பான் கதிர்களுக்கு முன்னால் ஒரு தடையாக வரும்போது, அவை மீண்டும் பிரதிபலிக்கப்படுகின்றன மற்றும் பெறுநரால் தடுக்கப்படுகின்றன.
இது ஒரு டிஜிட்டல் சிக்னலை உருவாக்குகிறது, இது மைக்ரோகண்ட்ரோலர்களுக்கும் ஆக்சுவேட்டர்களுக்கும் தடையாக எதிர்கொள்ள தேவையான நடவடிக்கை எடுக்க முடியும்.
ஒரு கருப்பு உடல் அதன் மீது உள்ள அனைத்து மின்காந்த கதிர்வீச்சு சம்பவங்களையும் உறிஞ்சி, ஒரு வெள்ளை உடல் அதைப் பிரதிபலிக்கிறது என்று அடிப்படை இயற்பியல் கூறுகிறது. இந்த கொள்கை வெள்ளை மற்றும் கருப்பு மேற்பரப்புக்கு இடையில் வேறுபடுவதற்கு ஒரு வரி பின்பற்றுபவரால் பயன்படுத்தப்படுகிறது.
ஒரு வரி பின்தொடர்பவர் ரோபோ எவ்வாறு செயல்படுகிறது:

இயல்பான நிலையில், ரோபோ இரண்டு சென்சார்களும் வெண்மையாகவும், கருப்பு கோடு இரு சென்சார்களுக்கிடையில் இருக்கும் வகையிலும் நகரும்.
போட் முன்னோக்கி செல்லும் திசையில் இரண்டு மோட்டார்கள் சுழற்ற திட்டமிடப்பட்டுள்ளது.
மிகவும் இயற்கையாகவே, நேரம் முடிந்தவுடன் இரண்டு சென்சார்களில் ஒன்று கருப்பு கோட்டிற்கு மேல் வருகிறது.
இடது சென்சார் வரிக்கு மேல் வந்தால், இடது மோட்டார்கள் ஓய்விற்கு கொண்டு வரப்படுகின்றன, இதன் விளைவாக போட் இடதுபுறம் திரும்பத் தொடங்குகிறது, இடது சென்சார் வெள்ளை மேற்பரப்பில் திரும்பி வந்து சாதாரண நிலை அடையப்படாவிட்டால்.
இதேபோல், வலது சென்சார் கருப்பு கோட்டின் மீது வரும்போது, வலது மோட்டார்கள் நிறுத்தப்பட்டு, இதன் விளைவாக போட் இப்போது வலதுபுறம் திரும்பும் வரை சென்சார் வெள்ளை மேற்பரப்பில் திரும்பி வரவில்லை. திருப்புவதற்கான இந்த வழிமுறை வேறுபட்ட இயக்கி பொறிமுறையாக அறியப்படுகிறது.
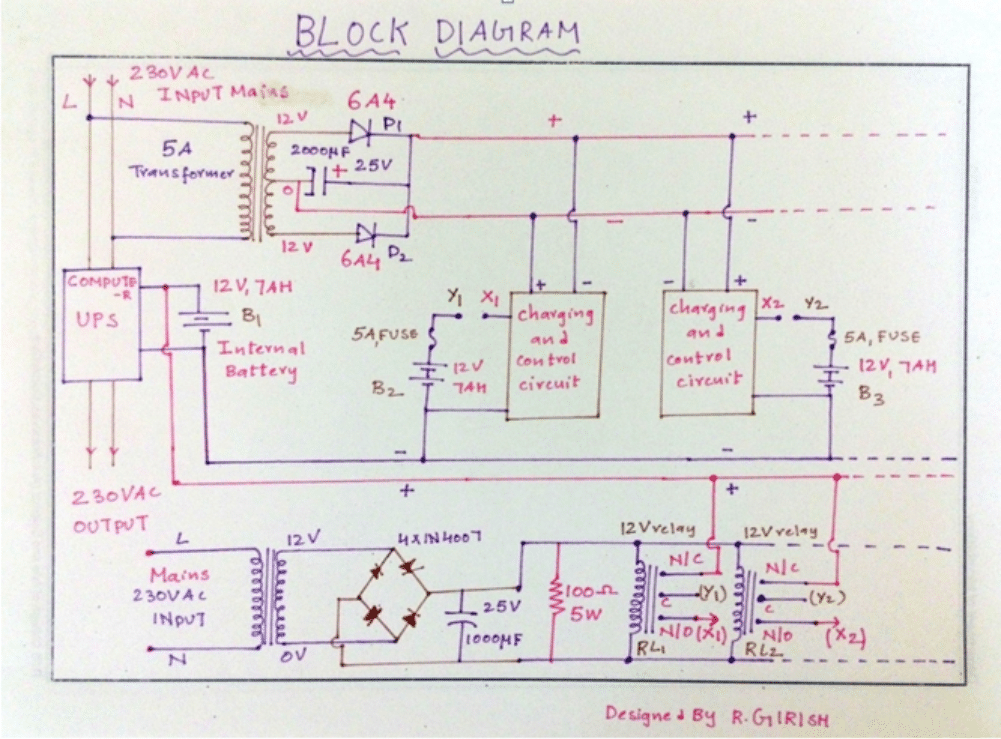
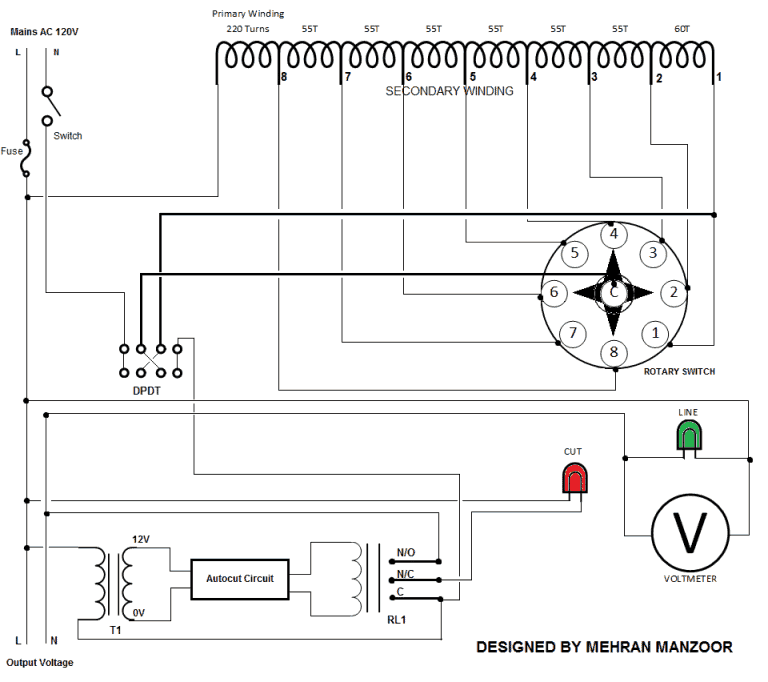
சர்க்கிட் டைகிராம்:

வயரிங் விவரங்கள்:

திட்டமிடல் மற்றும் கருத்துகள்:
சுற்றுப் பகுதியைச் செய்து முடித்த நாங்கள் இப்போது நிரலாக்க பகுதிக்கு செல்வோம். இந்த பிரிவில், எங்கள் ரோபோவைக் கட்டுப்படுத்தும் நிரலைப் புரிந்துகொள்வோம். இங்கே குறியீடு: / * Created and tested by Navneet Singh Sajwan
*Based on digital output of two sensors
*Speed control added
*/
int left, right
int value=250
void setup()
{
pinMode(6,INPUT)//left sensor
pinMode(7,INPUT)//right sensor
pinMode(9,OUTPUT)//left motor
pinMode(3,OUTPUT)//left motor
pinMode(10,OUTPUT)//right motor
pinMode(5,OUTPUT)//right motor
// Serial.begin(9600)
}
void read_sensors()
{
left=digitalRead(6)
right= digitalRead(7)
}
void move_forward()
{
analogWrite(9,value)//3,9 for left motor
digitalWrite(3,LOW)
analogWrite(10,value)//10,5 for right motor
digitalWrite(5,LOW)
}
void turn_left()
{
digitalWrite(9,LOW)//9,3 for left motor
digitalWrite(3,LOW)
analogWrite(10,value)//10,5 for right motor
digitalWrite(5,LOW)
}
void turn_right()
{
analogWrite(9,value)// 9,3 for left motor
digitalWrite(3,LOW)
digitalWrite(10,LOW)// 10,5 for right motor
digitalWrite(5,LOW)
}
void halt()
{
digitalWrite(9,LOW)// 9,3 for left motor
digitalWrite(3,LOW)
digitalWrite(10,LOW)// 10,5 for right motor
digitalWrite(5,LOW)
}
void print_readings()
{
Serial.print(' leftsensor')
Serial.print(' ')
Serial.print(left)
Serial.print('rightsensor')
Serial.print(' ')
Serial.print(right)
Serial.println()
}
void loop()
{
read_sensors()
while((left==0)&&(right==1)) // left sensor is over black line
{
turn_left()
read_sensors()
print_readings()
}
while((left==1)&&(right==0)) // right sensor is over black line
{
turn_right()
read_sensors()
print_readings()
}
while((left==0)&&(right==0)) // both sensors over the back line
{
halt()
read_sensors()
print_readings()
}
while((left==1)&&(right==1))// no sensor over black line
{
move_forward()
read_sensors()
print_readings()
}
}
பயன்படுத்தப்படும் செயல்பாடுகளின் விளக்கம்:
read_sensors (): இது சென்சார்களின் வாசிப்புகளை எடுத்து இடது மற்றும் வலது மாறிகளில் சேமிக்கிறது.
move_forward (): arduino இந்த செயல்பாட்டை இயக்கும் போது, இரண்டு மோட்டார்கள் முன்னோக்கி திசையில் நகரும்.
turn_left (): இடது மோட்டார் நிறுத்தங்கள். போட் இடதுபுறம் திரும்பும்.
turn_right (): வலது மோட்டார் நிறுத்தப்படும். பாட் வலதுபுறம் திரும்பும்.
நிறுத்த (): போட் நிறுத்தங்கள்.
print_readings (): சீரியல் மானிட்டரில் சென்சார்களின் அளவீடுகளைக் காட்டுகிறது. இதற்காக நீங்கள் “Serial.begin (9600)” ஐ வெற்றிட அமைப்பில் இணைக்க வேண்டும்.
சென்சார் வாசிப்புகள்:
| சென்சார் ஓவர் லைன் | சென்சார் வாசிப்புகள் | |
| இடது | உரிமை | |
| இடது சென்சார் | 0 | 1 |
| சரியான சென்சார் | 1 | 0 |
| இல்லை | 1 | 1 |
| இரண்டு | 0 | 0 |
வேக கட்டுப்பாடு:
சில நேரங்களில் மோட்டார்களின் வேகம் மிக அதிகமாக இருப்பதால், சென்சார் சிக்னல்களை அர்டுயினோ விளக்குவதற்கு முன்பு, ரோபோ கோட்டை இழக்கிறது. சுருக்கமாக, போட் அதிவேகத்தின் காரணமாக வரியைப் பின்பற்றுவதில்லை மற்றும் வழிமுறை சரியாக இருந்தாலும் வரியை இழந்து கொண்டே இருக்கிறது.
இத்தகைய சூழ்நிலைகளைத் தவிர்க்க, பிடபிள்யூஎம் நுட்பத்தைப் பயன்படுத்தி போட்டின் வேகத்தைக் குறைக்கிறோம். மேலே உள்ள குறியீட்டில் மதிப்பு என்ற மாறி உள்ளது.
வேகத்தை குறைக்க செயல்பாட்டில் எண் மதிப்பைக் குறைக்கவும். Arduino UNO இல் நீங்கள் 0 முதல் 255 வரை மட்டுமே pwm மதிப்புகளைக் கொண்டிருக்க முடியும்.
அனலாக்ரைட் (முள், மதிப்பு)
0<= value <=255
வரி பின்தொடர்பவரின் எனது இடுகையின் முடிவு இது. உங்கள் எரியும் அனைத்து கேள்விகளுக்கும் பதிலளிக்க இது போதுமானதாக இருக்கும் என்று நம்புகிறேன், அரிதான யதார்த்தத்தில் அது இல்லையென்றால், உங்களுக்கான கருத்துப் பிரிவு எப்போதும் எங்களிடம் உள்ளது. உங்கள் சந்தேகங்களை தெரிவிக்கவும். மகிழ்ச்சியான டிங்கரிங்!
முந்தைய: டிடிஎம்எஃப் தொகுதியைப் பயன்படுத்தி மொபைல் தொலைபேசி கட்டுப்படுத்தப்பட்ட ரோபோ கார் அடுத்து: கடவுச்சொல் கட்டுப்படுத்தப்பட்ட ஏசி மெயின்கள் ஆன் / ஆஃப் சுவிட்ச்