இந்த இடுகையில் சாலைகள் மற்றும் நெடுஞ்சாலைகளில் எந்தவொரு வாகனத்தின் வேகத்தையும் அளவிடக்கூடிய ஒரு சுற்று ஒன்றை உருவாக்க உள்ளோம். வாகனங்கள் அதிக வேகத்தில் இருப்பதாக சந்தேகிக்கப்படும் இடத்தில் முன்மொழியப்பட்ட சுற்று நிலையானதாக வைக்கப்படுகிறது. எந்தவொரு வாகனமும் வேக வரம்பைத் தாண்டினால், சுற்று உடனடியாக எச்சரிக்கிறது. குறியீடு, சுற்று வரைபடம் மற்றும் தர்க்கம் ஆகியவை வாகனத்தின் வேகம் எவ்வாறு அளவிடப்படுகிறது என்பதைப் பார்ப்போம்.
குறிக்கோள்
இந்தியாவில் தற்செயலான மரண அறிக்கை 2015 இன் படி அதிக வேகத்தில் 75% சாலை விபத்துக்கள் ஏற்படுகின்றன, இது ஒரு பெரிய எண்ணிக்கையாகும். நகரத்தின் வேக வரம்பை மீறி ஆபத்தான முறையில் தங்கள் வாகனத்தை ஓட்டும் வாகன ஓட்டிகளை தடுத்து வைக்க பெரும்பாலான போக்குவரத்து போலீசார் முயற்சிக்கின்றனர்.
ஒவ்வொரு முறையும் ஒரு போக்குவரத்து காவல்துறையினர் அதிவேக வாகனத்தை நிறுத்தி கட்டணம் வசூலிக்க முடியாது. எனவே வேகமான கேமரா எனப்படும் ஒரு சாதனம் நிறுவப்பட்டுள்ளது, அங்கு வாகன ஓட்டிகள் அடிக்கடி விபத்துக்குள்ளாகும் பகுதிகள், குறுக்குவெட்டுகள் போன்ற வேகத்தில் சந்தேகிக்கப்படுகிறார்கள்.
நாங்கள் வேக கேமராவைப் போன்ற ஒன்றை உருவாக்கப் போகிறோம், ஆனால் மிகவும் எளிமையான முறையில், பள்ளி, கல்லூரி அல்லது ஐடி பூங்காக்கள் போன்ற ஒரு வளாகத்திற்குள் அல்லது ஒரு வேடிக்கையான திட்டமாக நிறுவ முடியும்.
முன்மொழியப்பட்ட திட்டத்தில் 16 x 2 எல்சிடி டிஸ்ப்ளே உள்ளது, ஒவ்வொரு வாகனத்தின் வேகத்தையும் இரண்டு லேசர் கற்றைகள் வழியாகக் காண்பிக்கும், அவை சரியாக 10 மீட்டர் இடைவெளியில் வைக்கப்பட்டு, அந்த லேசர் கற்றைகளுக்கு இடையூறு செய்யும் போது வாகனத்தின் வேகத்தை அளவிடலாம்.
ஒரு வாகனம் கண்டுபிடிக்கப்பட்டதும், ஒவ்வொரு வாகனத்தின் வேகமும் எல்சிடி டிஸ்ப்ளேயில் காட்டப்படும் என்பதைக் குறிக்கும் வாகனம் கடந்து செல்லும்போது ஒரு பஸர் பீப் செய்யும். ஒரு வாகனம் வேக வரம்பைத் தாண்டிச் செல்லும்போது, பஸர் தொடர்ந்து ஒலிக்கும் மற்றும் வாகனத்தின் வேகம் காட்சிக்கு காண்பிக்கப்படும்.
குறிப்பு: வாகனம் வேகத்தில் அல்லது வேகத்தில் செல்வதைப் பொருட்படுத்தாமல் வாகனத்தின் வேகம் எல்சிடியில் காண்பிக்கப்படும்.
இப்போது வேகத்தை அளவிடுவதற்கு சுற்றுக்கு பின்னால் உள்ள தர்க்கத்தைப் பார்ப்போம்.
வேகம் - தூரம் - நேர சூத்திரம் என்ற எளிய சூத்திரத்தை நாம் அனைவரும் அறிவோம்.
வேகம் = தூரம் / நேரம்.
Second வினாடிக்கு மீட்டரில் வேகம்,
Meter மீட்டரில் தூரம்,
• வினாடிகளில் நேரம்.
வேகத்தை அறிய, ஒரு வாகனம் பயணித்த “x” மற்றும் அந்த தூரத்தை “x” ஐ மறைக்க எடுக்கப்பட்ட நேரம் ஆகியவற்றை நாம் தெரிந்து கொள்ள வேண்டும்.
இதைச் செய்ய நாங்கள் பின்வரும் பாணியில் 10 மீட்டர் தூரத்துடன் இரண்டு லேசர் கற்றைகளையும் இரண்டு எல்.டி.ஆர்களையும் அமைத்து வருகிறோம்:

தூரம் 10 மீட்டர் என்று எங்களுக்குத் தெரியும், இது சரி செய்யப்பட்டது, இப்போது நாம் சமன்பாட்டின் நேரத்தை அறிந்து கொள்ள வேண்டும்.
நேரம் ஆர்டுயினோவால் கணக்கிடப்படும், வாகனம் “ஸ்டார்ட் லேசரை” குறுக்கிடும்போது, டைமர் தொடங்குகிறது மற்றும் வாகனம் “எண்ட் லேசரை” குறுக்கிடும்போது டைமர் நிறுத்தப்பட்டு மதிப்புகளை சமன்பாட்டிற்குப் பயன்படுத்துவதால் வாகனத்தின் வேகத்தைக் கண்டுபிடிக்கும்.
வாகனத்தின் வேகம் ஒரு திசையில் மட்டுமே கண்டறியப்படும் என்பதை நினைவில் கொள்க, அதாவது லேசரை நிறுத்த லேசரைத் தொடங்குங்கள், வாகனத்தை மற்றொரு திசையில் கண்டறிய மற்றொரு அமைப்பை எதிர் திசையில் வைக்க வேண்டும். எனவே, பள்ளி, படத்தொகுப்பு போன்ற இடங்களுக்கு அவர்கள் IN மற்றும் OUT வாயில்கள் உள்ளன.
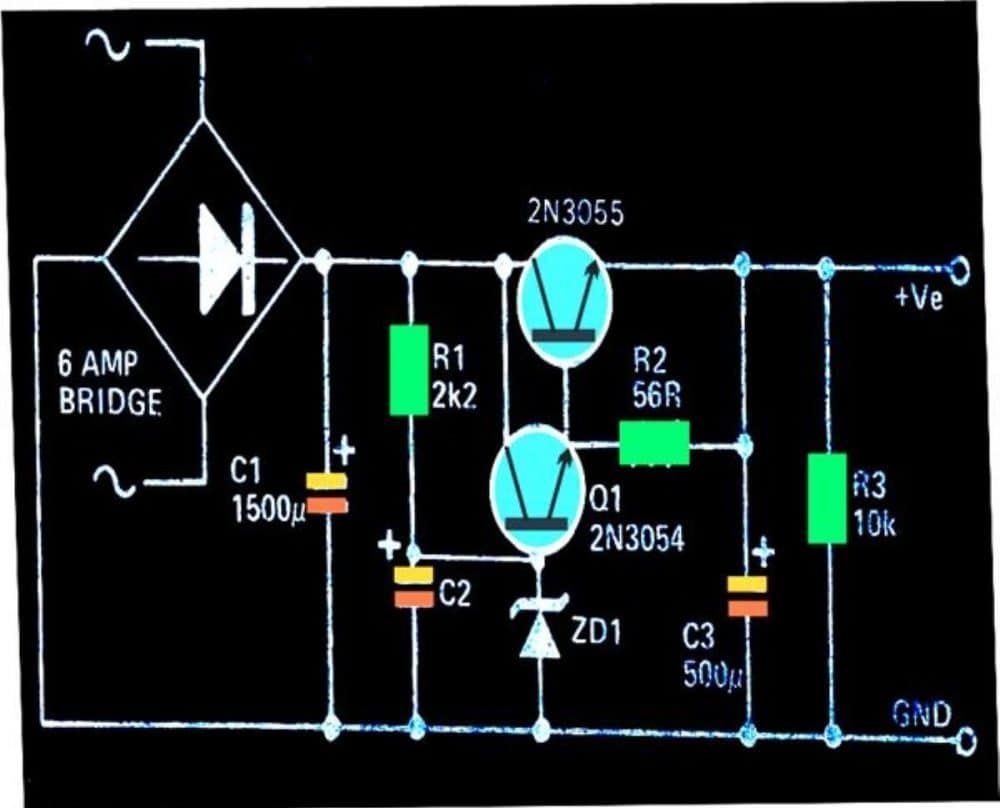
இப்போது திட்ட வரைபடத்தைப் பார்ப்போம்:
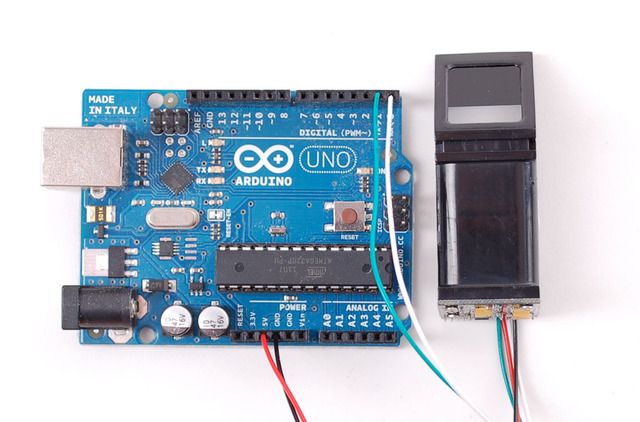
Arduino க்கும் காட்சிக்கும் இடையிலான இணைப்பு:

சுற்றுக்கு மேலே சுய விளக்கமளிக்கும் மற்றும் சுற்றுக்கு ஏற்ப வயரிங் இணைக்கவும். காட்சி மாறுபாட்டை சரிசெய்ய 10K பொட்டென்டோமீட்டரை சரிசெய்யவும்.
கூடுதல் வயரிங் விவரங்கள்:

மேலே உள்ள சுற்றுக்கு ஆர்டுயினோ, 4 புஷ் பொத்தான்கள், இரண்டு 10 கே புல் டவுன் மின்தடையங்கள் (மின்தடையங்களின் மதிப்பை மாற்ற வேண்டாம்), இரண்டு எல்.டி.ஆர் மற்றும் ஒரு பஸர் ஆகியவை உள்ளன. 4 புஷ் பொத்தான்களின் செயல்பாடு விரைவில் விளக்கப்படும். இப்போது எல்.டி.ஆரை சரியாக ஏற்றுவது எப்படி என்று பார்ப்போம்.

எல்.டி.ஆர் என்னை சூரிய ஒளியில் இருந்து சரியாக மூடியிருக்க வேண்டும், லேசர் கற்றை மட்டுமே எல்.டி.ஆரை தாக்க வேண்டும். உங்கள் லேசர் தொகுதி பிரகாசமான சூரிய ஒளியில் வேலை செய்யும் அளவுக்கு சக்தி வாய்ந்தது என்பதை உறுதிப்படுத்திக் கொள்ளுங்கள்.
மேலே உள்ள நோக்கத்திற்காக நீங்கள் ஒரு பி.வி.சி குழாயைப் பயன்படுத்தலாம் மற்றும் குழாயின் உள்ளே கருப்பு நிறமாக வண்ணம் தீட்டலாம் முன் பகுதியை மறைக்க மறக்காதீர்கள், இதைச் செய்ய உங்கள் படைப்பாற்றலைப் பயன்படுத்தவும்.
நிரல் குறியீடு:
// ----------- Developed by R.GIRISH ---------//
#include
#include
const int rs = 7
const int en = 6
const int d4 = 5
const int d5 = 4
const int d6 = 3
const int d7 = 2
LiquidCrystal lcd(rs, en, d4, d5, d6, d7)
const int up = A0
const int down = A1
const int Set = A2
const int change = A3
const int start = 8
const int End = 9
const int buzzer = 10
const float km_h = 3.6
int distance = 10 // In meters.
int variable = 0
int count = 0
int address = 0
int value = 100
int speed_address = 1
int speed_value = 0
int i = 0
float ms = 0
float Seconds = 0
float Speed = 0
boolean buzz = false
boolean laser = false
boolean x = false
boolean y = false
void setup()
{
pinMode(start, INPUT)
pinMode(End, INPUT)
pinMode(up, INPUT)
pinMode(down, INPUT)
pinMode(Set, INPUT)
pinMode(change, INPUT)
pinMode(buzzer, OUTPUT)
digitalWrite(change, HIGH)
digitalWrite(up, HIGH)
digitalWrite(down, HIGH)
digitalWrite(Set, HIGH)
digitalWrite(buzzer, LOW)
lcd.begin(16, 2)
lcd.clear()
lcd.setCursor(0, 0)
lcd.print(F(' Vehicle Speed'))
lcd.setCursor(0, 1)
lcd.print(F(' detector'))
delay(1500)
if (EEPROM.read(address) != value)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Set Speed Limit')
lcd.setCursor(0, 1)
lcd.print('km/h:')
lcd.setCursor(6, 1)
lcd.print(count)
while (x == false)
{
if (digitalRead(up) == LOW)
{
lcd.setCursor(6, 1)
count = count + 1
lcd.print(count)
delay(200)
}
if (digitalRead(down) == LOW)
{
lcd.setCursor(6, 1)
count = count - 1
lcd.print(count)
delay(200)
}
if (digitalRead(Set) == LOW)
{
speed_value = count
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Speed Limit is')
lcd.setCursor(0, 1)
lcd.print('set to ')
lcd.print(speed_value)
lcd.print(' km/h')
EEPROM.write(speed_address, speed_value)
delay(2000)
x = true
}
}
EEPROM.write(address, value)
}
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Testing Laser')
lcd.setCursor(0, 1)
lcd.print('Alignment....')
delay(1500)
while (laser == false)
{
if (digitalRead(start) == HIGH && digitalRead(End) == HIGH)
{
laser = true
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Laser Alignment')
lcd.setCursor(0, 1)
lcd.print('Status: OK')
delay(1500)
}
while (digitalRead(start) == LOW && digitalRead(End) == LOW)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Both Lasers are')
lcd.setCursor(0, 1)
lcd.print('not Aligned')
delay(1000)
}
while (digitalRead(start) == LOW)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Start Laser not')
lcd.setCursor(0, 1)
lcd.print('Aligned')
delay(1000)
}
while (digitalRead(End) == LOW)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('End Laser not')
lcd.setCursor(0, 1)
lcd.print('Aligned')
delay(1000)
}
}
lcd.clear()
}
void loop()
{
if (digitalRead(change) == LOW)
{
change_limit()
}
if (digitalRead(start) == LOW)
{
variable = 1
buzz = true
while (variable == 1)
{
ms = ms + 1
delay(1)
if (digitalRead(End) == LOW)
{
variable = 0
}
}
Seconds = ms / 1000
ms = 0
}
if (Speed
y = true
}
Speed = distance / Seconds
Speed = Speed * km_h
if (isinf(Speed))
{
lcd.setCursor(0, 0)
lcd.print('Speed:0.00')
lcd.print(' km/h ')
}
else
{
lcd.setCursor(0, 0)
lcd.print('Speed:')
lcd.print(Speed)
lcd.print('km/h ')
lcd.setCursor(0, 1)
lcd.print(' ')
if (buzz == true)
{
buzz = false
digitalWrite(buzzer, HIGH)
delay(100)
digitalWrite(buzzer, LOW)
}
if (Speed > EEPROM.read(speed_address))
{
lcd.setCursor(0, 0)
lcd.print('Speed:')
lcd.print(Speed)
lcd.print('km/h ')
lcd.setCursor(0, 1)
lcd.print('Overspeed Alert!')
if (y == true)
{
y = false
for (i = 0 i <45 i++)
{
digitalWrite(buzzer, HIGH)
delay(50)
digitalWrite(buzzer, LOW)
delay(50)
}
}
}
}
}
void change_limit()
{
x = false
count = EEPROM.read(speed_address)
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Set Speed Limit')
lcd.setCursor(0, 1)
lcd.print('km/h:')
lcd.setCursor(6, 1)
lcd.print(count)
while (x == false)
{
if (digitalRead(up) == LOW)
{
lcd.setCursor(6, 1)
count = count + 1
lcd.print(count)
delay(200)
}
if (digitalRead(down) == LOW)
{
lcd.setCursor(6, 1)
count = count - 1
lcd.print(count)
delay(200)
}
if (digitalRead(Set) == LOW)
{
speed_value = count
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Speed Limit is')
lcd.setCursor(0, 1)
lcd.print('set to ')
lcd.print(speed_value)
lcd.print(' km/h')
EEPROM.write(speed_address, speed_value)
delay(2000)
x = true
lcd.clear()
}
}
}
// ----------- Developed by R.GIRISH ---------//
இந்த சுற்று எவ்வாறு இயங்குவது என்பதை இப்போது பார்ப்போம்:
Circuit நீங்கள் சுற்று முடித்து குறியீட்டைப் பதிவேற்றவும்.
L இரண்டு ஒளிக்கதிர்கள் / எல்.டி.ஆர்களுக்கிடையேயான தூரம் சரியாக 10 மீட்டர் இருக்க வேண்டும், குறைவாகவோ அல்லது அதிகமாகவோ இருக்கக்கூடாது, இல்லையெனில் வேகம் தவறாக கணக்கிடப்படும் (முதல் வரைபடத்தில் காட்டப்பட்டுள்ளது).
Choice லேசர் மற்றும் எல்.டி.ஆருக்கு இடையிலான தூரம் உங்கள் விருப்பத்திற்கும் சூழ்நிலைகளுக்கும் முடியும்.
D எல்.சி.டி.யில் காட்டப்படும் தகவல்களின்படி தயவுசெய்து அதை சரிசெய்தால், எல்.டி.ஆருடன் லேசர் தவறாக வடிவமைக்க சுற்று சரிபார்க்கும்.
• ஆரம்பத்தில் சுற்று உங்களை ஒரு கிமீ / மணிநேரத்தில் வேக வரம்பு மதிப்பை உள்ளிடுமாறு கேட்கும், அதற்கு அப்பால் சுற்று எச்சரிக்கைகள், (எஸ் 1) மற்றும் கீழ் (எஸ் 2) ஐ அழுத்துவதன் மூலம் காட்சியில் எண்ணை மாற்றலாம் மற்றும் செட் (எஸ் 3) ஐ அழுத்தவும், இது மதிப்பு சேமிக்கப்படும்.
Speed இந்த வேக வரம்பை மாற்ற, பொத்தானை S4 ஐ அழுத்தி, புதிய வேக வரம்பை அமைக்கலாம்.
• இப்போது மணிக்கு 30 கிமீ வேகத்தில் ஒரு மோட்டார் பைக் டிரைவை எடுத்து லேசர் கற்றைகளுக்கு இடையூறு செய்யுங்கள், சுற்று உங்களுக்கு 30 கிமீ / மணி நேரத்திற்கு மிக அருகில் ஒரு எண்ணைக் காட்ட வேண்டும்.
Completed நீங்கள் முடித்துவிட்டீர்கள், உங்கள் சுற்று பாதுகாப்புக்கு உங்கள் சுற்று தயாராக உள்ளது.
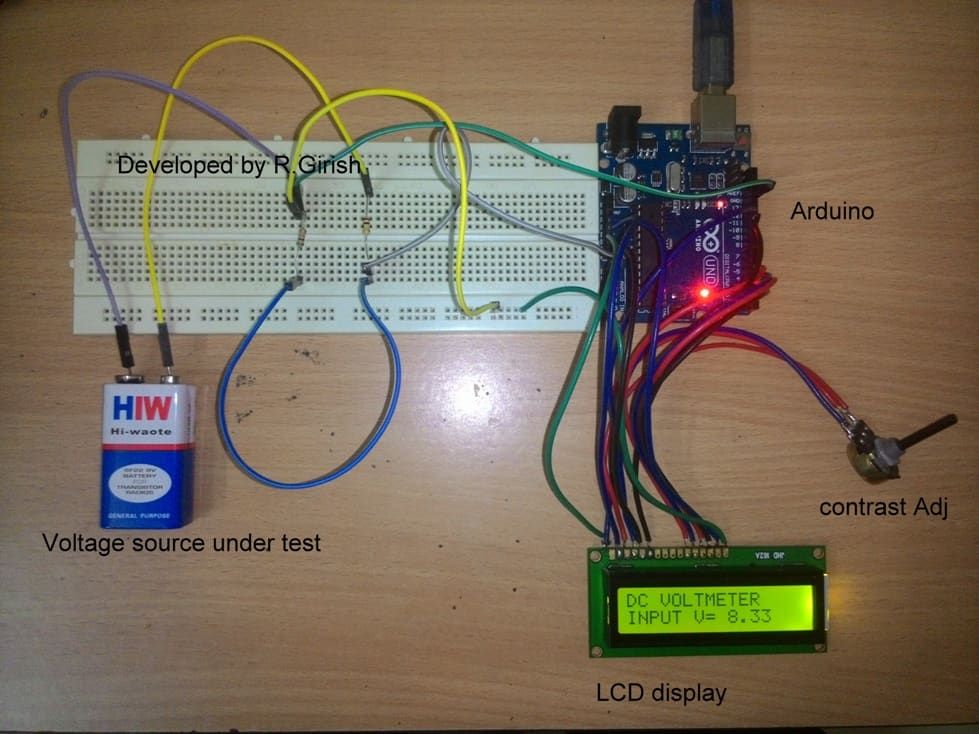
ஆசிரியரின் முன்மாதிரி:

இந்த போக்குவரத்து பொலிஸ் வாகன வேக கண்டறிதல் சுற்று குறித்து ஏதேனும் கேள்விகள் இருந்தால், தயவுசெய்து கருத்துப் பிரிவில் கேட்க தயங்கவும், நீங்கள் விரைவான பதிலைப் பெறலாம்.
முந்தைய: பி.ஐ.ஆர் சென்சார் தரவுத்தாள், பின்அவுட் விவரக்குறிப்புகள், வேலை அடுத்து: ரிமோட் கண்ட்ரோல் டெஸ்டர் சர்க்யூட்